Significance of Crowd Scene Analysis
-
lManagement of large gatherings of people at events or in confined spaces
-
lAnomaly detection, localization, and alarm
-
lCrowd surveillance, public place monitoring, security control, etc.

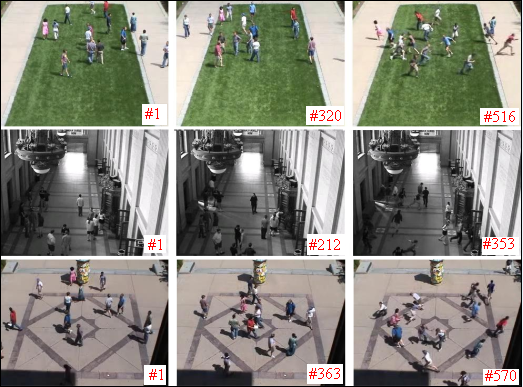
Figure 1. Crowd scenarios with different levels of coherency.
-
lVery high density of objects
-
Diverse level of coherency of motions
-
Traditional methods
Only suitable for sparse scenes
Suffer from the problems due to severe occlusions, small object sizes, similar appearance
The Idea
-
Lagrangian particle dynamics + chaotic invariants

Figure 2. Framework for anomaly detection and localization.
The Novelties
-
Unique utilization of clustering of particle trajectories for modeling crowded scenes
-
Chaotic dynamics are introduced into the crowd context
-
Being able to deal with both coherent and incoherent flows
Particle Advection


Figure 3. Particle trajectories overlayed on three crowd scenes. Top row shows zoom-in view of parts of each scene.
Cluster Particle Trajectories
-
Principle: A bunch of adjacent particle trajectories may belong to a single sub-object
-
Method: clustering
Step 1: Remove relatively motionless particles and trajectories that carry minor information
Step 2: Cluster by k-means according to position information
Output: Representative trajectories

Figure 4. Trajectories after low variance particles are removed. Top row shows zoom-in view of parts of each scene.
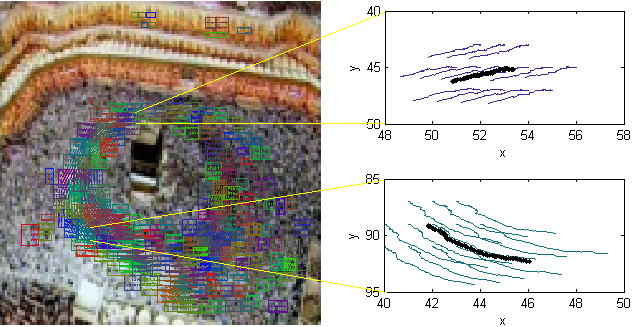
Figure 5. Trajectories clustered according to position information, (left) and representative trajectories for two clusters (right).

Figure 6. Representative trajectories for three scenes. Top row shows zoom-in view of parts of each scene.
Chaotic Invariantsl
-
Representation of scenes: Representative trajectories
-
To identify the scene’s dynamics in terms of the dynamics of representative trajectories: lChaotic dynamics by measurable chaotic invariants
F = { L, D, M }
-
L: Largest Lyapunov exponent
-
lD: Correlation dimension
-
lM: Mean of representative trajectories (Only necessary for position-caused anomalies)

Figure. The algorithm for computing L and D.
Advantages of the Algorithm
-
lProven to be insensitive to the changes in time delay, embedding dimension, size of data set and to some extent noise
-
lEnsure L>0 for condition of chaotic analysis

Figure 7. Largest Lyapunov exponents for representative trajectories using our method (left) and the method of [
7] (right).