


Autonomous control of unmanned vehicles is an important area
of research in artificial intelligence. Intelligence in an autonomous robot must
include strategies for mobility in order to achieve higher lever functional
tasks. This project aims at a system for an Unmanned Aerial Vehicle (UAV)
following moving targets on ground. The UAV has physical constraints on airspeed
and maneuverability. The target however can move freely and in any general
pattern. We assume minimum knowledge about the target while navigating the
aircraft. The system includes visual tracking of the target with a camera
mounted on the UAV. The camera is also controlled by the closed loop algorithm
according to the position and orientation of the aircraft and the position of
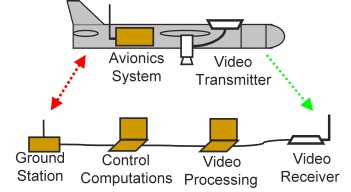
the target. Aircraft stablization and interpretation is performed using an
autopilot system "Piccolo" by Cloud Cap Technology. The navigation and visual
processing is performed on computers at the ground, control commands from which
are sent to the aircraft wirelessly. The figure shows our system architecture
and pictures of the individual components.
|
|
|
| (a) The system Architecture | (b) The Piccolo Avionics System |
|
|
|
| (c) The UAV | (b) The Ground Station |
Associated publications:
Fahd Rafi, Saad M. Khan, Khurram Shafiq, Mubarak Shah. Autonomous Target Following by Unmanned Aerial Vehicles, SPIE Defense and Security Symposium 2006, Orlando FL.