| Online Detection and Classification of Moving Objects Using Progressively Improving Detectors
Related Publication: Omar Javed, Saad Ali and Mubarak Shah, Online Detection and Classification of Moving Objects Using Progressively Improving Detectors, IEEE International Conference on Computer Visiona and Pattern Recognition (CVPR), 2005. |
|||||||||||||||||||||
|
|
|||||||||||||||||||||
IntroductionMajor limitations of classification algorithms like Adaboost, SVMs, or Naïve Bayes include,
|
|||||||||||||||||||||
Feature ExtractionFeatures for classification are derived from Principal Component Analysis (PCA) of the appearance templates of the training examples. For each object class ci (excluding background) an appearance subspace, represented by d x mi projection matrix Si, is constructed. m is chosen such that eigenvectors represent 99% of respective subspace. Appearance features for base learners are obtained by projecting a training example ‘r’ into appearance subspace of each object class. For two object classes the feature vector v of an example will be,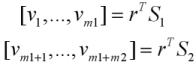
|
|||||||||||||||||||||
Initial TrainingThe Bayes Classifier is used as the base (weak) classifier for boosting. Each feature vector component vq, where q ranges from 1,.., m1+m2 (for two object classes + background class), is used to learn the pdf for each class. The classification decision by the qth base classifier hq is taken as ci, ifAdaboost.M1 (Freund and Schapire, 96) is used to learn the strong classifier, from the initial training data and the base classifiers. 
|
|||||||||||||||||||||
 Row 1: Top 3 eigenvectors for person appearance subspace. Row 2: Vehicle appearance subspace |
 Histograms of a feature coefficients from the appearance subspace |
||||||||||||||||||||
The Online Co-training FrameworkThe boosting mechanism selects the least correlated base classifiers, which is an ideal property for co-training. The examples confidently labeled by one classifier are used to train the other classifier. In order to carry out this step, only the examples lying close to the decision boundary of the boosted classifier are useful, as classifiying such examples correctly will improve the classification performance. In other words, we employ examples with small margins for online training. The implementation steps of the online co-training framework are:
 Information flow for the real-time object classification system |
|||||||||||||||||||||
|
|||||||||||||||||||||
Downloads | |||||||||||||||||||||