| Floor Fields for Tracking in High Density Crowd Scenes
Related Publication: Saad Ali and Mubarak Shah, Floor Fields for Tracking in High Density Crowd Scenes, The 10th European Conference on Computer Vision (ECCV), 2008. |
|||||||
|
|
|||||||
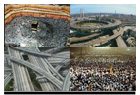
IntroductionTracking individuals in a high density crowd scene is challenging for a number of reasons: 1) the number of pixels on an object decreases with the increasing density of the objects; 2) constant interaction among the individuals in a crowd makes it hard to discern individuals from one another; 3) occlusions caused by inter-object interactions result in the loss of observation of the target object; 4) the mechanics of a human crowd is complex as it exhibits goal-directed dynamics and psychological characteristics which in turn influence how an individual person will behave in a crowd.To overcome some of these challenges, we have developed an algorithm for tracking individual targets in high density crowd scenes containing hundreds of people at a time. The proposed algorithm is based on the observation that the locomotive behavior of an individual in a crowded scene is a function of collective patterns evolving from the space-time interactions of individuals among themselves and with the layout of the scene. These collective behavioral patterns, therefore, can be included as an auxiliary source of information to constrain the likely locations or paths that can be taken by the target object in the scene. In other words, natural crowd flow and scene constraints influencing the behavior of a person in a dense crowd can be used as priors to impose high-level direction for tracking purposes. The flow of the crowd and scene structure is incorporated by introducing the concept of floor fields, which model the interactions between individuals and their preferred direction of movement by transforming long ranged forces into local ones. For instance, a long range force that compels an individual in a crowd to move towards the exit door, can be converted into a local force such that it increases the instantaneous probability of a move in that direction. The transition probability of a tracked person then depends on the strength of the floor field in his/her neighborhood. The concept of a floor field is inspired by the field of evacuation dynamics, where floor fields are manually designed to simulate behaviors of pedestrians in panic situations. We compute three floor fields automatically from the visual data: a `Static Floor Field' (SFF), a `Boundary Floor Field' (BFF), and a `Dynamic Floor Field' (DFF). |
|||||||
Algorithmic Steps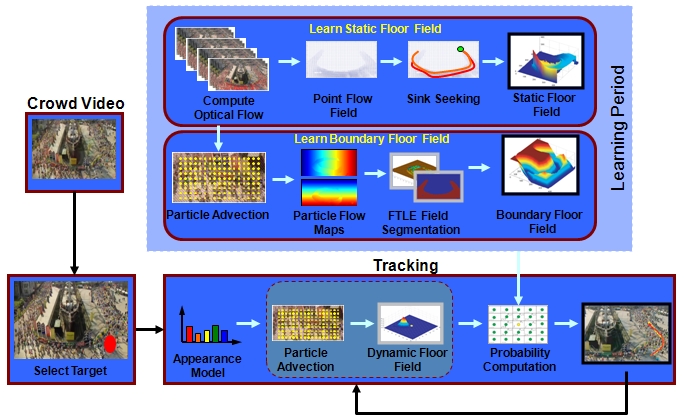 (a) The block diagram of the tracking algorithm. |
|||||||
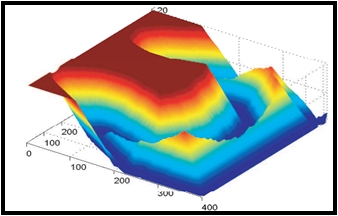
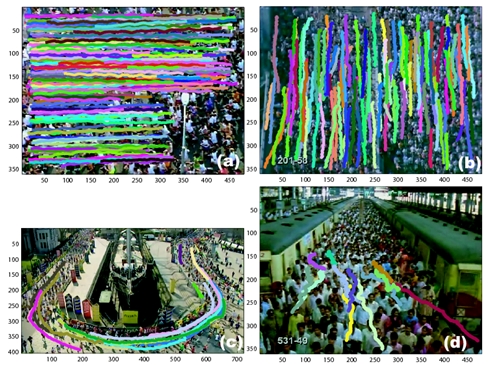
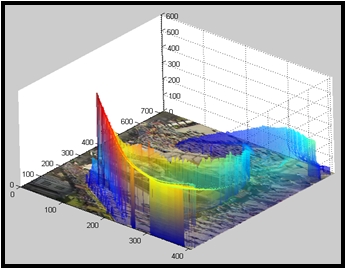
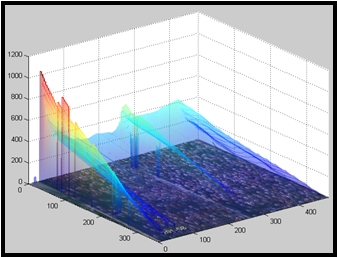
i) Static Floor FieldThe SFF is aimed at capturing attractive and constant properties of the scene. These properties include preferred areas, such as dominant pathes often taken by the crowd as it moves through the scene, and preferred exit locations. Some video sequences and their corresponding static floor fields.. |
|||||||


|
|||||||
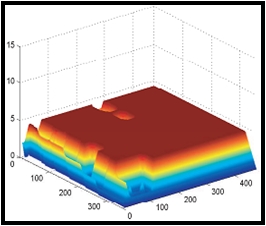
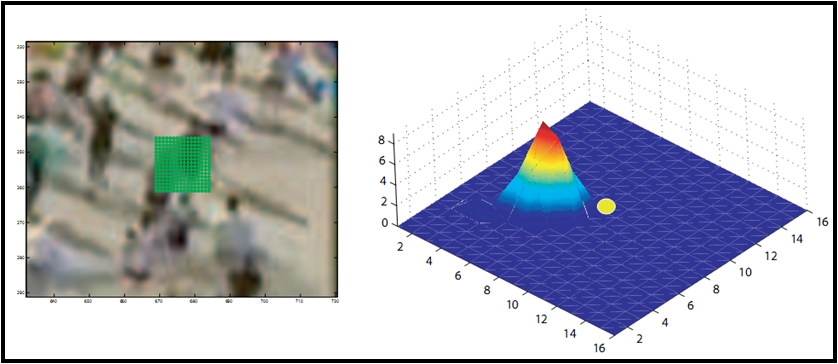
ii) Dynamic Floor FieldThe objective of the DFF is to determine the behavior of the crowd around the individual being tracked. The instantaneous information about the motion of the crowd is an important cue for constraining likely future locations. There is one DFF per pixel where each DFF captures the dynamic interaction between the target pixel i and remaining pixels in the scene. A visualization of the DFF for one particular pixel is shown in following Figure. |
|||||||
 |
|||||||
|
|||||||
|
|||||||
Downloads1. ECCV 2008 Presentation (.pdf) (contains videos, 135MGB)2. ECCV 2008 Presentation (.ppt) | |||||||