Andrew Miller, Mubarak Shah, Don Harper
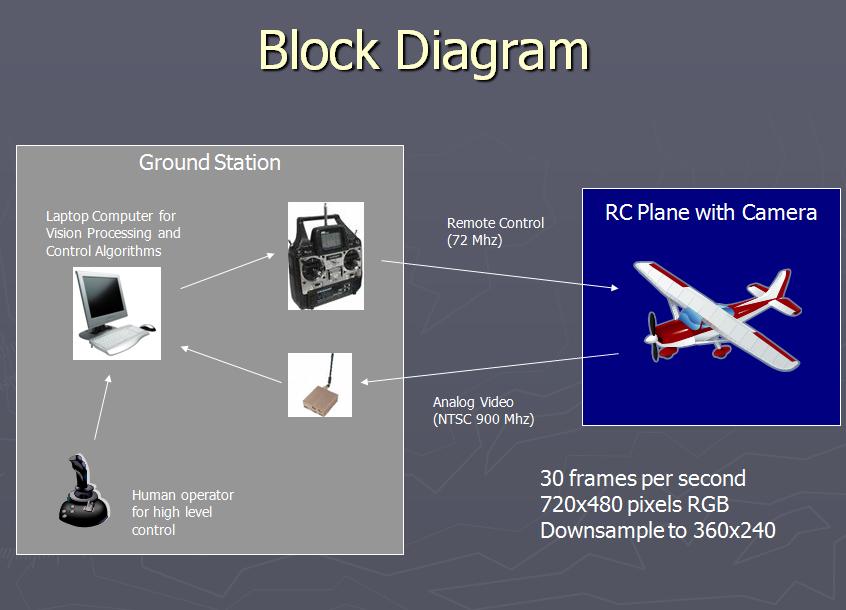
The goal of this project is to land a UAV on a runway using computer vision. The UAV has no sensors other than a forward-looking video camera. The video is transmitted in real time to a ground-station that uses image registration to detect and determine the orientation of the runway in each frame. The ground-station sends radio commands back to the UAV to guide it to the runway.
Our method for detecting the runway in each frame uses an annotated video of a previous landing as a reference. RANSAC and SIFT feature point matching are used to find a planar homography between each frame and a reference image.


We tested our system in two ways. First, we used Microsoft Flight Simulator X as a hardware-in-the-loop simulator. The only output from the simulator software was the VGA display and the only input was joystick commands. We also used a real RC aircraft with an onboard camera and transmitter.

Click Here to see the presentation delivered at ICRA 2008!
-Landing a UAV on a Runway Using Image Registration. Andrew Miller, Mubarak Shah, and Don Harper. IEEE Conference on Robotics and Automation. Pasdena, 2008.