3D Model based Object Class Detection in An Arbitrary View
Pingkun Yan and Saad M. KhanIn this project, a novel method for detecting objects in the same class from arbitrary views is developed. The method is based on a new 3D feature model. Instead of using a complicated mechanism for relating multiple 2D training views, the proposed method establishes spatial connections between these views by mapping them directly to the surface of 3D model. The 3D shape of an object is reconstructed by using a homographic framework from a set of model views around the object and is represented by a volume consisting of binary slices. Features are computed in each 2D model view and mapped to the 3D shape model using the same homographic framework. To generalize the model for object class detection, features from supplemental views are also considered. A codebook is constructed from all of these features and then a 3D feature model is built. Given a 2D test image, correspondences between the 3D feature model and the testing view are identified by matching the detected features. Based on the 3D locations of the corresponding features, several hypotheses of viewing planes can be made. The one with the highest confidence is then used to detect the object using feature location matching. Performance of the proposed method has been evaluated by using the PASCAL VOC challenge dataset and promising results are demonstrated.
This research project was funded in part by the U.S. Government VACE program.
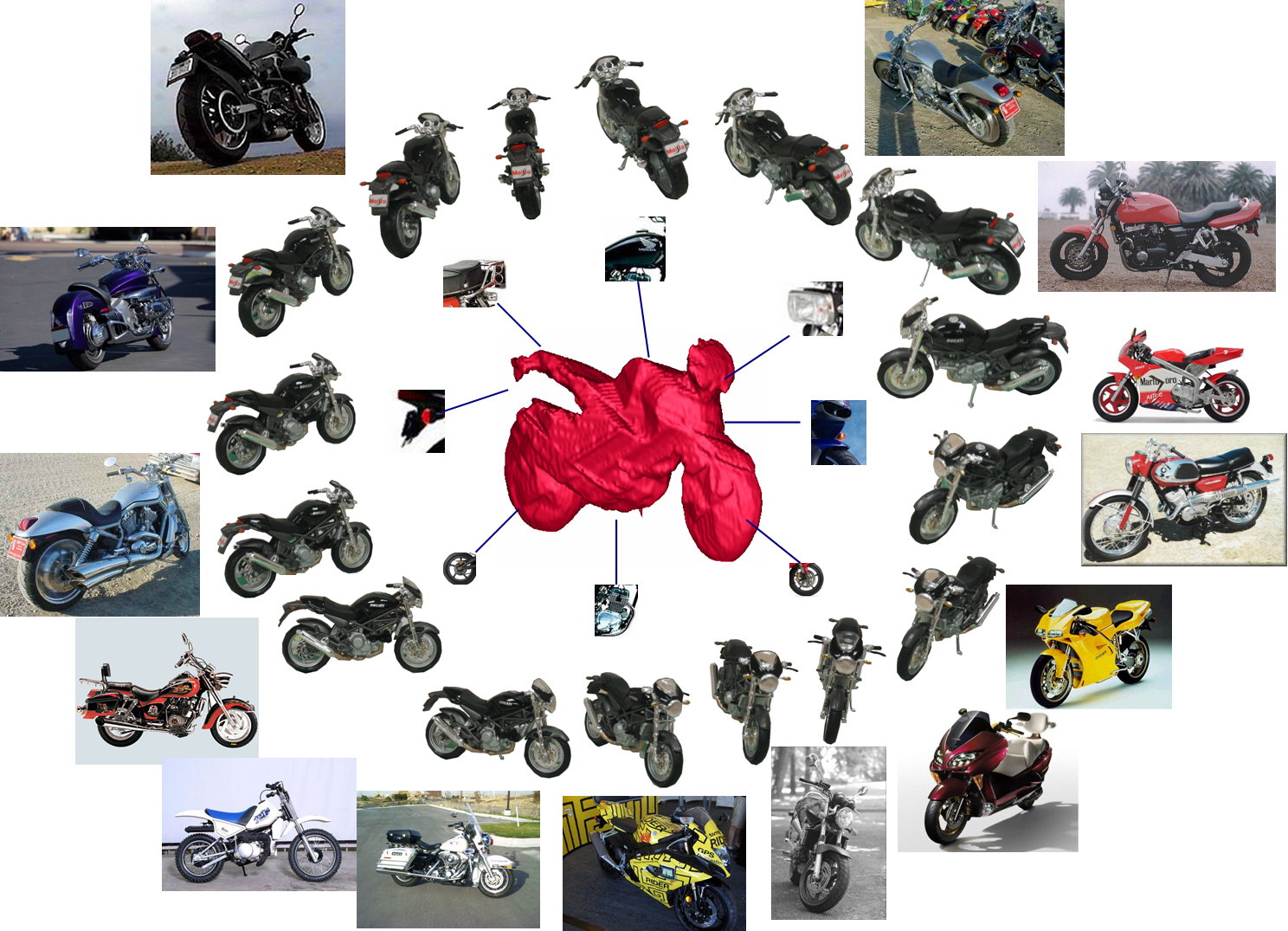
Construction of 3D feature model for motorbikes.
(Please refer to the associated publications for details)

Construction of 3D feature model for motorbikes.
(Please refer to the associated publications for details)
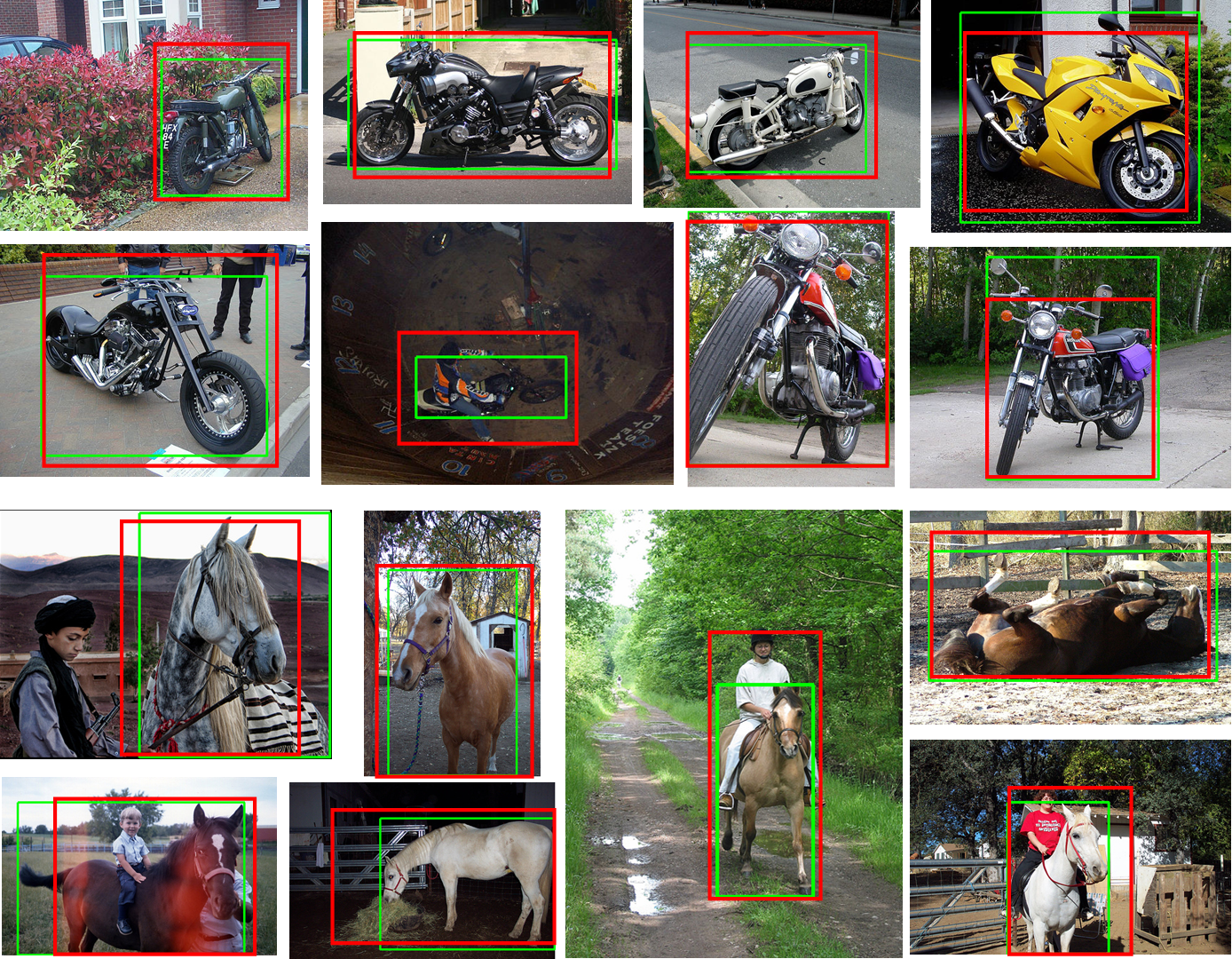
Object detection examples.
Associated publications:
- Pingkun Yan, Saad M. Khan, and Mubarak Shah, 3D Model based Object Class Detection in An Arbitrary View, IEEE International Conference on Computer Vision (ICCV), 2007.
- Saad M. Khan, Pingkun Yan, and Mubarak Shah, A Homographic Framework for the Fusion of Multi-view Silhouettes, IEEE International Conference on Computer Vision (ICCV), 2007.