Seeing Through Water
Introduction
Several attempts have been lately proposed to tackle the
problem of recovering the original image of an underwater
scene using a sequence distorted by water waves. The
main drawback of the state of the art is that it heavily
depends on modelling the waves, which in fact is ill-posed
since the actual behavior of the waves along with the
imaging process are complicated, and include several
noise components; therefore, their results are not satisfactory.
In this paper, we revisit the problem by proposing a
data-driven two-stage approach, each stage is targeted toward
a certain type of noise. The first stage leverages the
temporal mean of the sequence to overcome the structured
turbulence of the waves through an iterative robust registration
algorithm. The result of the first stage is a high quality
mean and a better structured sequence; however, the sequence
still contains unstructured sparse noise. Thus, we
employ a second stage at which we extract the sparse errors
from the sequence through rank minimization. Our method
converges faster, and drastically outperforms state of the art
on all testing sequences even only after the first stage.
Reconstruction Examples
Proposed Method
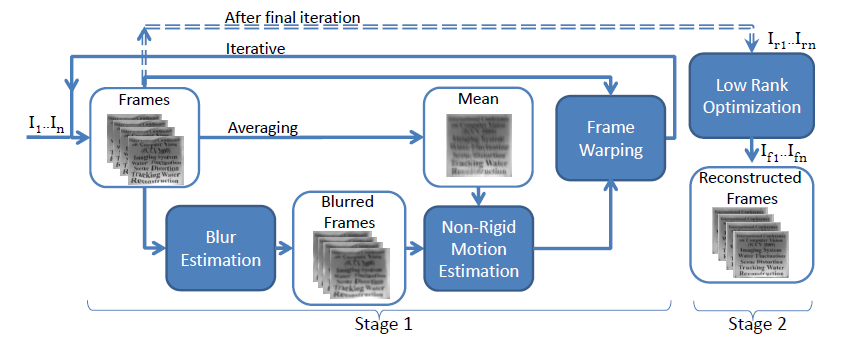
Figure 1 shows the main steps in our method for seeing through water. First, we iteratively register the frames to their mean
while updating the mean at every iteration. At every registration iteration, we estimate the blur level of the mean and adjust the blur
of the frames to match the blur level of mean. When the registration is finished, the remaining distortion is spare; therefore, we
extract the sparse errors through rank minimization.
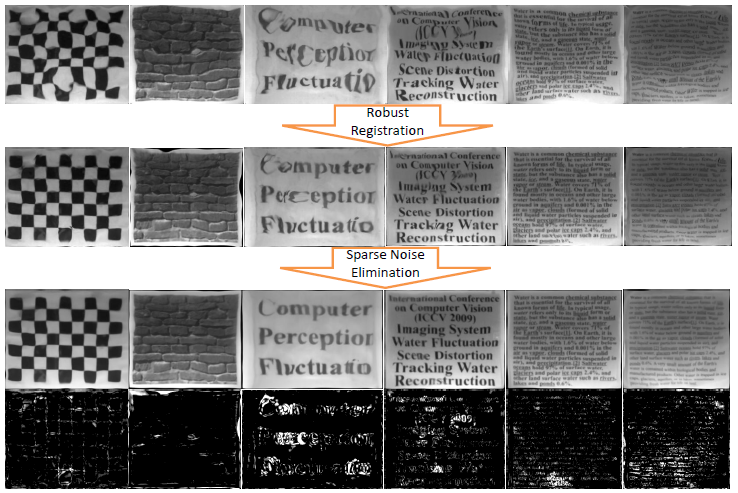
Results - Sample Frames
Figure 2 shows the reconstruction results for sample frames from each sequence after applying each stage of our algorithm.
The first stage overcomes most water turbulence; however, sparse errors are only eliminated after the second stage.
The Final two rows show the reconstructed images and the sparse errors
respectively after rank minimization.
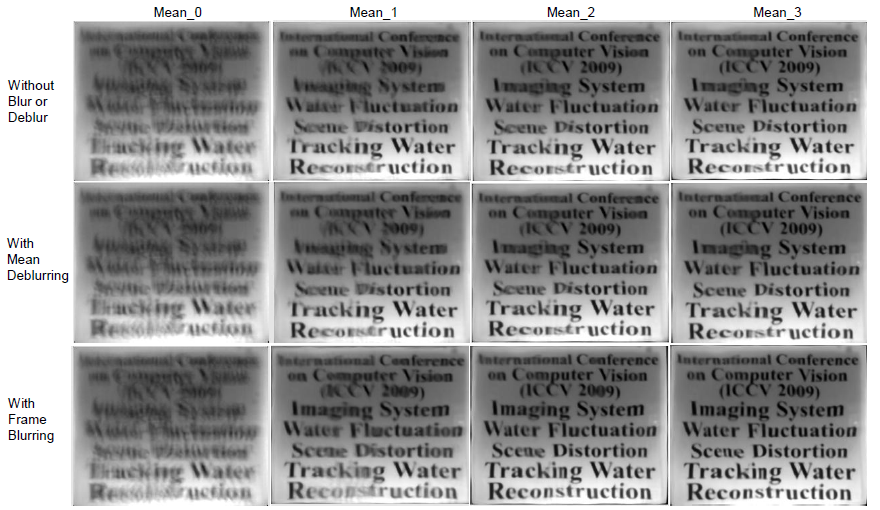
Evolution of the Mean
Figure 3 shows the evolution of the mean in stage 1. Left to right: The mean after each iteration of registration. Top to bottom: Stage 1 applied
without blurring or deblurring, with mean deblurring, and with our frame blurring. After three iterations, the mean is significantly enhanced
in all cases. However, underwater words on the left part of the image like "Imaging", "Water", "Scene", "Tracking", and "Reconstruction"
are only correctly reconstructed using the frame blurring.
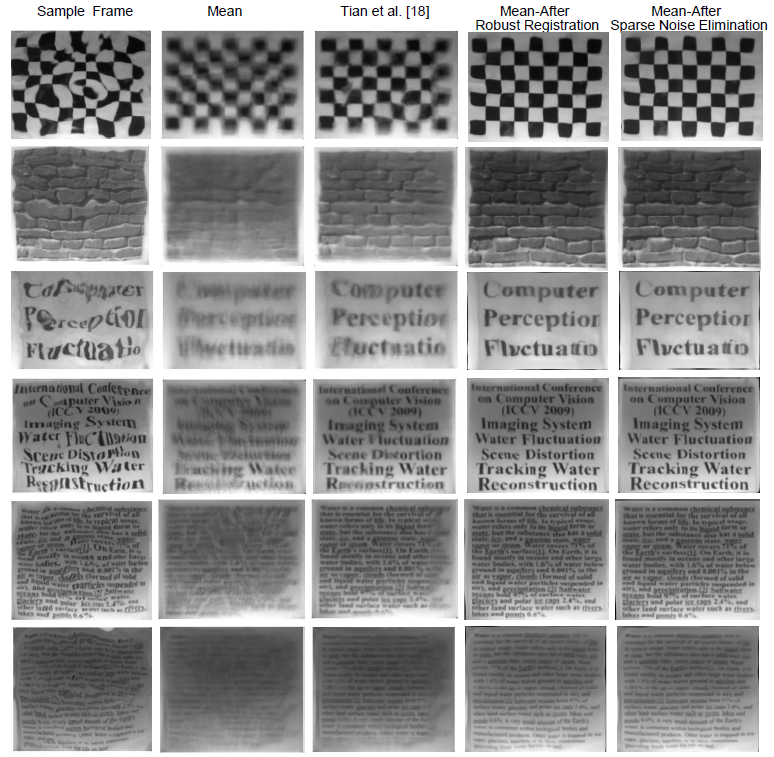
Mean Comparision
Figure 4 shows the image restoration results on standard sequences from [18]. The first column shows a sample frame from the input video, which
is severely distorted. The second column shows the temporal mean of the sequence. The third column is the result from [18]. Finally our
results are shown in the last two columns, after the first and second stages respectively. Results from our method clearly outperform [18]
on all sequences even after the first stage.
Related Publication
Omar Oreifej, Guang Shu, Teresa Pace, and Mubarak Shah.
A Two-Stage Reconstruction Approach for Seeing Through Water,
International Conference on Computer Vision and Pattern Recognition (CVPR) 2011.